3D Printed Spidex Mini Quadcopter
Posted: Wed Jun 25, 2014 1:40 pm
As shown last meeting I've been building a 3D Printed Min-Quad.
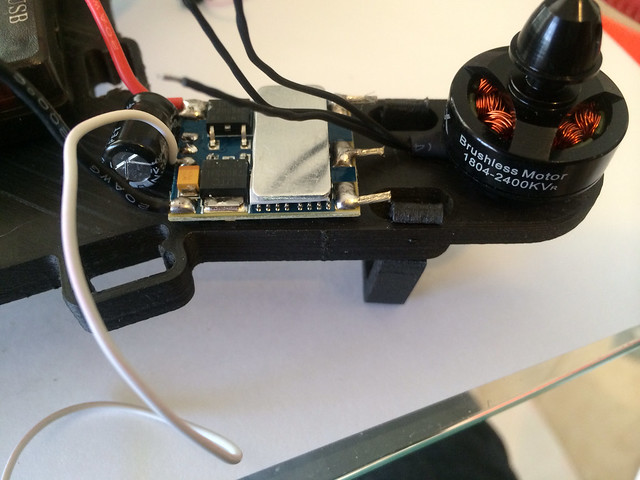
Here is a close-up of the the motor being wired up to the Speed Controller, the motors are brushless DC motors and the Speed controller is a 12A, you need 4 of each.
The frame is available on Thingiverse and was initially the Spidex Micro http://www.thingiverse.com/thing:326062 as I like the small form factor something I can put in my briefcase and stop after work somewhere and go for a fly. The original Spidex had some shortcomings and found a remix that is much more solid http://www.thingiverse.com/thing:288932 I've since remixed this to create a more universal base for different motor mounts [http://www.thingiverse.com/thing:367532]
The printing and assembly has been the easy parts, the hard part has been the learning to fly haha, so far have had 5 rebuilds due to operator assisted crashes. It's also true what they say, when learning to fly, make sure you have plenty of spare props, luckily I ordered oodles and have been coming away with one-two prop breakages per session, although it must be a sign I'm improving as this is getting less now.
Also some traps for neewbs, I didn't realise that you really need a L/H and R/H rotation motors, especially the locknuts as if theres a crash, the nuts come off and are VERY hard to find, so if your going to build one, make sure you get both left CW and CCW motors and not make the same mistake as me.
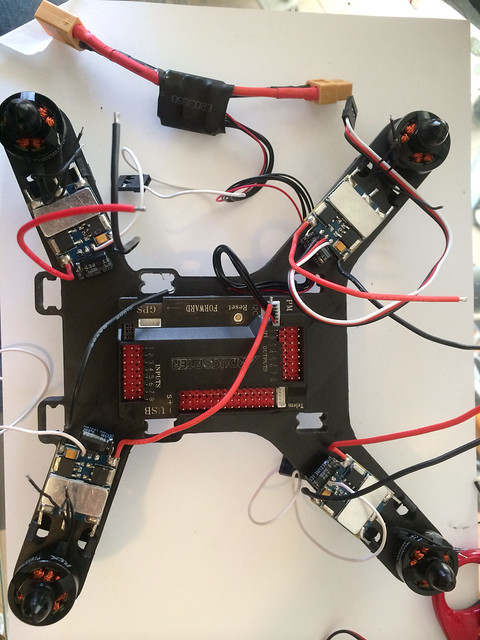
I'm using the Arduocopter APM as my flight controller, easy to use and configure and relatively cheap, while the this particular quad is not really designed for this light controller, I've made it fit and works well with some anti-vibration mount (aka double sided tape and some rubber in between)
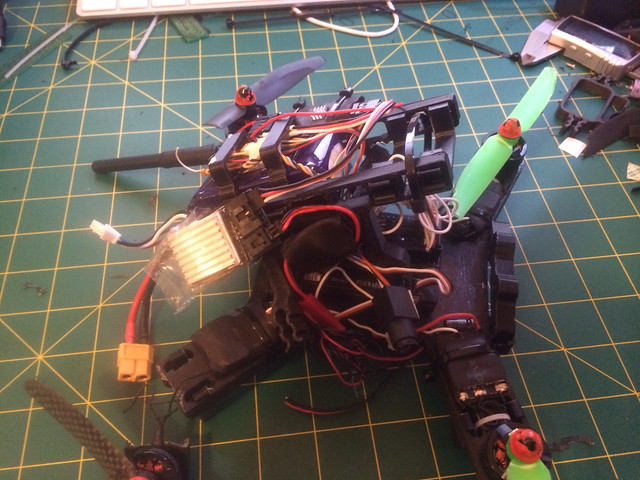
Initial body as Carbon Fibre PLA, also tried PLA, but I'm finding the ABS bodies are the strongest and are less prone to breakage....weell not so much 150M falls though haha but really the base did stand up fairly well
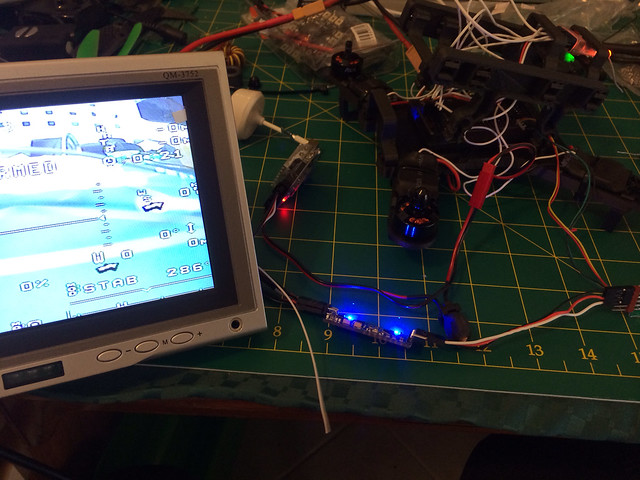
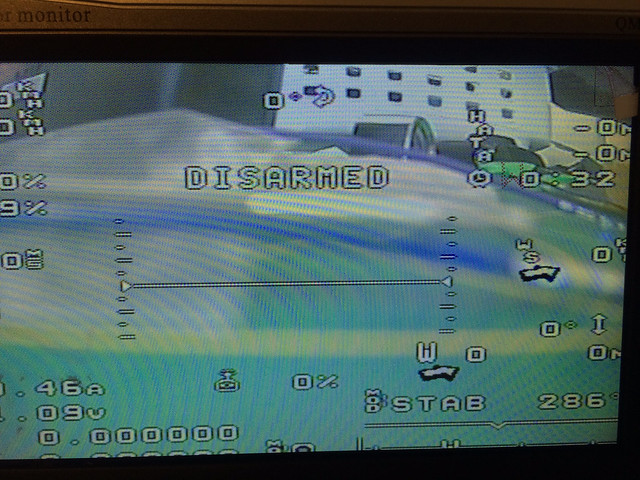
I have two cameras running, and FPV (First Person View) that is transmitted back to base station with and on Screen display overlaid with all telemetry flight data, this will feed into a set of goggles I've got, at the moment just feeding into a small 7" Reversing camera screen. I'm using a 200mW 5.8Gghz transmitter and easily works the ranges I've been using, also was transmitting all the time I had my runaway and we had a feed back where I was, so could see it all, I've also got a HD Mobius sports camera mounted on top for recording the flights in HD, this works well.
Radio system is 2.4Ghz Frequency hopping (Standard R/C gear) and using a 7 channel Receiver, although will be changing this shortly to one that will provide me RSSI signal which I'll be overlaying on the OSD (On Screen Display)
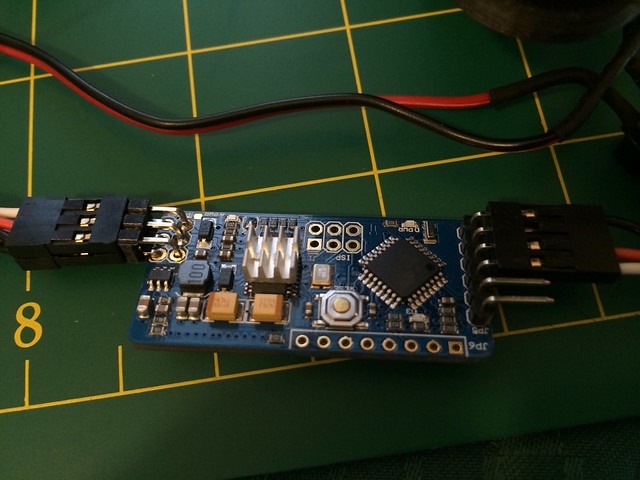

OSD Mod by adding small heatsink as the overlay chip handling the Video signals gets really hot.
Here is a close-up of the the motor being wired up to the Speed Controller, the motors are brushless DC motors and the Speed controller is a 12A, you need 4 of each.
The frame is available on Thingiverse and was initially the Spidex Micro http://www.thingiverse.com/thing:326062 as I like the small form factor something I can put in my briefcase and stop after work somewhere and go for a fly. The original Spidex had some shortcomings and found a remix that is much more solid http://www.thingiverse.com/thing:288932 I've since remixed this to create a more universal base for different motor mounts [http://www.thingiverse.com/thing:367532]
The printing and assembly has been the easy parts, the hard part has been the learning to fly haha, so far have had 5 rebuilds due to operator assisted crashes. It's also true what they say, when learning to fly, make sure you have plenty of spare props, luckily I ordered oodles and have been coming away with one-two prop breakages per session, although it must be a sign I'm improving as this is getting less now.
Also some traps for neewbs, I didn't realise that you really need a L/H and R/H rotation motors, especially the locknuts as if theres a crash, the nuts come off and are VERY hard to find, so if your going to build one, make sure you get both left CW and CCW motors and not make the same mistake as me.
I'm using the Arduocopter APM as my flight controller, easy to use and configure and relatively cheap, while the this particular quad is not really designed for this light controller, I've made it fit and works well with some anti-vibration mount (aka double sided tape and some rubber in between)
Initial body as Carbon Fibre PLA, also tried PLA, but I'm finding the ABS bodies are the strongest and are less prone to breakage....weell not so much 150M falls though haha but really the base did stand up fairly well
I have two cameras running, and FPV (First Person View) that is transmitted back to base station with and on Screen display overlaid with all telemetry flight data, this will feed into a set of goggles I've got, at the moment just feeding into a small 7" Reversing camera screen. I'm using a 200mW 5.8Gghz transmitter and easily works the ranges I've been using, also was transmitting all the time I had my runaway and we had a feed back where I was, so could see it all, I've also got a HD Mobius sports camera mounted on top for recording the flights in HD, this works well.
Radio system is 2.4Ghz Frequency hopping (Standard R/C gear) and using a 7 channel Receiver, although will be changing this shortly to one that will provide me RSSI signal which I'll be overlaying on the OSD (On Screen Display)
OSD Mod by adding small heatsink as the overlay chip handling the Video signals gets really hot.